Week-04 (Sistem Persamaan Diferensial dan Shooting Method)
Sistem Persamaan Diferensial
Bentuk umum
Bentuk umum sistem Persamaan Diferensial:
\(u'_1 = f_1(t,u_1,u_2,...,u_m)\)
\(u'_2 = f_2(t,u_1,u_2,...,u_m)\)
\(...\)
\(u'_m = f_m(t,u_1,u_2,...,u_m)\)
dimana:
\(a \leq t \leq b\)
\(u_1(a)=a_1, u_2(a)=a_2, ..., u_m(a)=a_m\) (initial value)
Function file
Pada modul ini, akan dibahas mengenai metode Runge-Kutta untuk menyelesaikan sistem persamaan diferensial. Berikut merupakan code dari metode Runge-Kutta untuk sistem persamaan diferensial pada Octave yang perlu disimpan pada function file.
function [t, w1, w2] = rkfs(f1, f2, a, b, n, alph1, alph2)
h = (b - a)/n;
t = w1 = w2 = [];
t(1) = a;
w1(1) = alph1;
w2(1) = alph2;
for i = 1:n
k11 = h * f1(t(i), w1(i), w2(i));
k12 = h * f2(t(i), w1(i), w2(i));
k21 = h * f1((t(i)+(h/2)), (w1(i)+(k11/2)), (w2(i)+(k12/2)));
k22 = h * f2((t(i)+(h/2)), (w1(i)+(k11/2)), (w2(i)+(k12/2)));
k31 = h * f1((t(i)+(h/2)), (w1(i)+(k21/2)), (w2(i)+(k22/2)));
k32 = h * f2((t(i)+(h/2)), (w1(i)+(k21/2)), (w2(i)+(k22/2)));
k41 = h * f1((t(i)+h), (w1(i)+k31), (w2(i)+k32));
k42 = h * f2((t(i)+h), (w1(i)+k31), (w2(i)+k32));
w1(i+1) = w1(i) + (k11 + 2*k21 + 2*k31 + k41)/6;
w2(i+1) = w2(i) + (k12 + 2*k22 + 2*k32 + k42)/6;
t(i+1) = a + i*h;
endfor
endfunctionContoh sistem PD
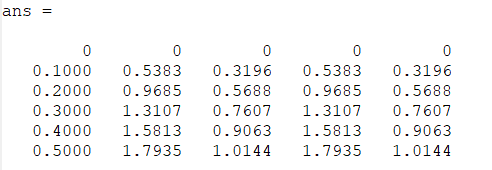
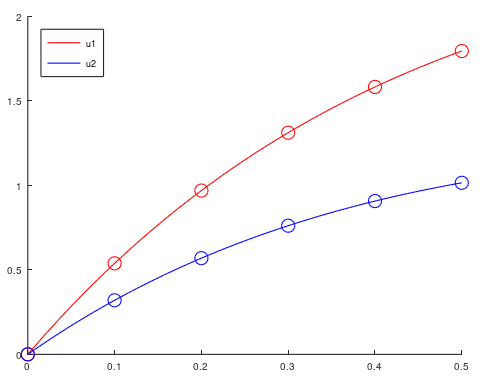
\(u'_1 = -4u_1+3u_2+6, \;u_1(0)=0\)
\(u'_2 = -2.4u_1+1.6u_2+3.6, \;u_2(0)=0\)
Akan diuji dengan \(h=0.1\) dan \(0\leq t \leq 0.5\)
Solusi eksak:
\(u_1(t)=-3.375e^{-2t}+1.875e^{-0.4t}+1.5\)
\(u_2(t) = -2.25e^{-2t}+2.25e^{-0.4t}\)
Berikut adalah code script file untuk menjalankan function metode Runge-Kutta untuk sistem PD di atas:
f1 = @(t, y1, y2) (-4*y1 + 3*y2 + 6);
f2 = @(t, y1, y2) (-2.4*y1 + 1.6*y2 + 3.6);
a = 0;
b = 0.5;
n = 5;
alph1 = 0;
alph2 = 0;
[t, w1, w2] = rkfs(f1, f2, a, b, n, alph1, alph2);
sln1 = @(t) (-3.375*exp(-2*t) + 1.875*exp(-0.4*t) + 1.5);
sln2 = @(t) (-2.25*exp(-2*t) + 2.25*exp(-0.4*t));
w1ex = w2ex = [];
for i = 1:length(t)
w1ex(i) = sln1(t(i));
w2ex(i) = sln2(t(i));
endfor
[t', w1', w2', w1ex', w2ex']
hold on;
fplot(sln1, [0, 0.5], 'r');
fplot(sln2, [0, 0.5], 'b');
scatter(t, w1, 'r');
scatter(t, w2, 'b');
legend('u1', 'u2');
legend('location', 'northwest');Jika kita run script file tersebut, maka program akan mengeluarkan dua macam output, yaitu tabel serta plot perbandingan solusi eksak dan aproksimasi seperti di bawah ini:
Linear Shooting Method
Bentuk Umum
Linear Shooting merupakan metode untuk menyelesaikan masalah PD berbentuk:
\(-y'' + p(x)y' + q(x)y + r(x) = 0, \;a\leq x\leq b\)
\(y(a)=\alpha, \;y(b)=\beta\)
Function File
function [x_i, w_1i, w_2i] = linshoot(p, q, r, a, b, n, alpha, beta)
h = (b - a)/n;
u = [alpha ; 0];
v = [0 ; 1];
x_i = w_1i = w_2i = [];
for i = 1:n
x = a + (i-1)*h;
k_11 = h * u(2,i);
k_12 = h * (p(x)*u(2,i) + q(x)*u(1,i) + r(x));
k_21 = h * (u(2,i)+(k_12/2));
k_22 = h * (p(x+(h/2))*(u(2,i)+(k_12/2)) + q(x+(h/2))*(u(1,i)+(k_11/2)) + r(x+(h/2)));
k_31 = h * (u(2,i)+(k_22/2));
k_32 = h * (p(x+(h/2))*(u(2,i)+(k_22/2)) + q(x+(h/2))*(u(1,i)+(k_21/2)) + r(x+(h/2)));
k_41 = h * (u(2,i)+k_32);
k_42 = h * (p(x+h)*(u(2,i)+k_32) + q(x+h)*(u(1,i)+k_31) + r(x+h));
u(1,i+1) = u(1,i) + ((k_11 + 2*k_21 + 2*k_31 + k_41)/6);
u(2,i+1) = u(2,i) + ((k_12 + 2*k_22 + 2*k_32 + k_42)/6);
kp_11 = h * v(2,i);
kp_12 = h * (p(x)*v(2,i) + q(x)*v(1,i));
kp_21 = h * (v(2,i) + (kp_12/2));
kp_22 = h * (p(x+(h/2))*(v(2,i)+(kp_12/2)) + q(x+(h/2))*(v(1,i)+(kp_11/2)));
kp_31 = h * (v(2,i)+(kp_22/2));
kp_32 = h * (p(x+(h/2))*(v(2,i)+(kp_22/2)) + q(x+(h/2))*(v(1,i)+(kp_21/2)));
kp_41 = h * (v(2,i)+kp_32);
kp_42 = h * (p(x+h)*(v(2,i)+kp_32) + q(x+h)*(v(1,i)+kp_31));
v(1,i+1) = v(1,i) + (kp_11 + 2*kp_21 + 2*kp_31 + kp_41)/6;
v(2,i+1) = v(2,i) + (kp_12 + 2*kp_22 + 2*kp_32 + kp_42)/6;
endfor
w = [alpha ; ((beta - u(1,(n+1))) / v(1,(n+1)))];
x_i(1) = a;
w_1i(1) = w(1,1);
w_2i(1) = w(2,1);
for i = 2:(n+1)
W1 = u(1,i) + w(2,1)*v(1,i);
W2 = u(2,i) + w(2,1)*v(2,i);
x = a + (i-1)*h;
x_i(i) = x;
w_1i(i) = W1;
w_2i(i) = W2;
endfor
endfunctionContoh Linear Shooting
\(y'' = -\frac{2}{x}y' + \frac{2}{x^2}y + \frac{\sin(\ln(x))}{x^2}, \; 1\leq x\leq 2\)
\(y(1)=1,\; y(2)=2\)
dengan \(n=10\)
dan solusi eksak:
\(y=c_1x+\frac{c_2}{x^2} - \frac{3}{10}\sin(\ln(x))-\frac{1}{10}cos(\ln(x))\)
\(c_2 = \frac{1}{70}(8-12\sin(\ln(2)) - 4\cos(\ln(2)))\)
\(c_1 = \frac{11}{10}-c_2\)
Berikut code script file untuk permasalahan di atas menggunakan metode linear shooting:
p = @(x) (-2*(x^(-1)));
q = @(x) (2*(x^(-2)));
r = @(x) (sin(log(x))*(x^(-2)));
a = 1;
b = 2;
alph = 1;
bet = 2;
[xi, w1i, w2i] = linshoot(p, q, r, a, b, 10, alph, bet);
c2 = (8-12*sin(log(2)) - 4*cos(log(2)))/70;
c1 = (11/10) - c2;
sln = @(x) (c1*x + (c2*x^(-2)) - (3/10)*sin(log(x)) - (1/10)*cos(log(x)));
w = [];
for i = 1:length(xi)
w(i) = sln(xi(i));
endfor
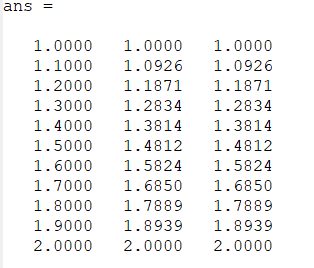
[xi', w1i', w']
hold on;
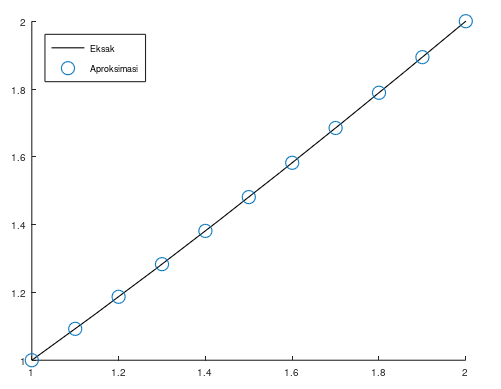
fplot(sln, [1,2], 'k');
scatter(xi, w1i, '-r');
legend('Eksak', 'Aproksimasi');
legend('location', 'northwest');Jika kita run script file tersebut, maka program akan mengeluarkan dua macam output, yaitu tabel serta plot perbandingan solusi eksak dan aproksimasi seperti di bawah ini:
Nonlinear Shooting Method
Bentuk umum
Nonlinear Shooting digunakan untuk menyelesaikan masalah PD berbentuk:
\(y'' = f(x, y, y'), \; a\leq x \leq b\)
\(y(a)=\alpha, \; y(b)=\beta\)
dimana, \(f\) merupakan fungsi nonlinear
Function file
function [x_i, w_1i, w_2i] = nonlinshoot(f, fy, fyp, a, b, n, alpha, beta, m, tol) % m adalah maksimum iterasi
h = (b - a)/n;
k = 1;
tk = (beta - alpha)/(b - a);
x_i = w_1i = w_2i = [];
while k <= m
w = [alpha;tk];
u = [0,1];
for i = 1:n
x = a + (i-1)*h;
k_11 = h*w(2,i);
k_12 = h*f(x, w(1,i), w(2,i));
k_21 = h*(w(2,i)+(k_12/2));
k_22 = h*f((x+(h/2)), (w(1,i)+(k_11/2)), (w(2,i)+(k_12/2)));
k_31 = h*(w(2,i)+(k_22/2));
k_32 = h*f((x+(h/2)), (w(1,i)+(k_21/2)), (w(2,i)+(k_22/2)));
k_41 = h*(w(2,i)+k_32);
k_42 = h*f((x+h), (w(1,i)+k_31), (w(2,i)+k_32));
w(1,i+1) = w(1,i) + ((k_11 + 2*k_21 + 2*k_31 + k_41)/6);
w(2,i+1) = w(2,i) + ((k_12 + 2*k_22 + 2*k_32 + k_42)/6);
kp_11 = h*u(2);
kp_12 = h*(fy(x, w(1,i), w(2,i))*u(1) + fyp(x, w(1,i), w(2,i))*u(2));
kp_21 = h*(u(2) + (kp_12/2));
kp_22 = h*(fy((x+(h/2)), w(1,i), w(2,i))*u(1) + fyp((x+(h/2)), w(1,i), w(2,i))*(u(2) + (kp_12/2)));
kp_31 = h*(u(2)+(kp_22/2));
kp_32 = h*(fy((x+(h/2)), w(1,i), w(2,i))*(u(1) + (kp_21/2)) + fyp((x+(h/2)), w(1,i), w(2,i))*(u(2) + (kp_22/2)));
kp_41 = h*(u(2)+kp_32);
kp_42 = h*(fy((x+h), w(1,i), w(2,i))*(u(1)+kp_31) + fyp((x+h), w(1,i), w(2,i))*(u(2) + kp_32));
u(1) = u(1) + (kp_11 + 2*kp_21 + 2*kp_31 + kp_41)/6;
u(2) = u(2) + (kp_12 + 2*kp_22 + 2*kp_32 + kp_42)/6;
endfor
if abs(w(1,n+1) - beta) <= tol % jika sudah mencapai batas toleransi maka program berhenti
for i = 1:(n+1)
x = a+(i-1)*h;
x_i(i) = x;
w_1i(i) = w(1,i);
w_2i(i) = w(2,i);
endfor
return
endif
tk = tk-((w(1,n+1) - beta)/u(1));
k = k + 1;
endwhile
disp('max iteration')
endfunctionContoh Nonlinear Shooting
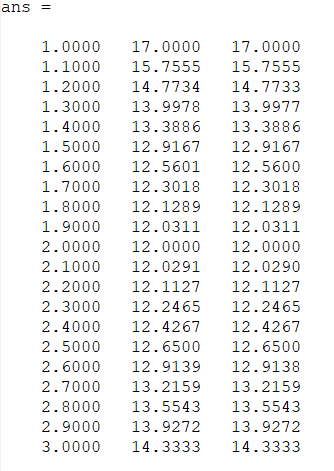
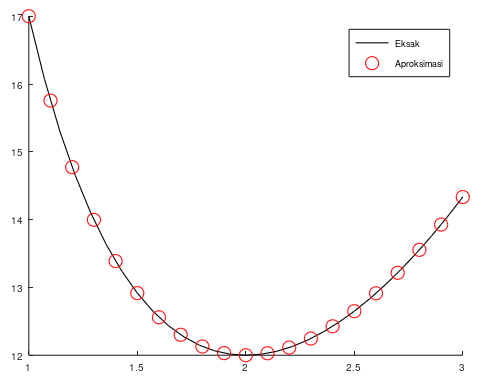
\(y'' = \frac{1}{8}(32+2x^3-yy'), \; 1\leq x \leq 3\)
\(y(1) = 17, \; y(3)=43/3\)
dengan \(n=20\), \(m=10\), dan toleransi \(=10^{-5}\)
dan solusi eksak:
\(y(x)=x^2 + \frac{16}{x}\)
Berikut code script file untuk permasalahan di atas menggunakan metode linear shooting:
f = @(x, y, yp) ((1/8)*(32 + 2*x^3 - y*yp));
fy = @(x, y, yp) (-yp/8);
fyp = @(x, y, yp) (-y/8);
a = 1;
b = 3;
n = 20;
alph = 17;
bet = 43/3;
m = 10;
tol = 10^(-5);
[xi, w1i, w2i] = nonlinshoot(f, fy, fyp, a, b, n, alph, bet, m, tol);
sln = @(x) ((x^2) + (16/x));
w = [];
for i = 1:length(xi)
w(i) = sln(xi(i));
endfor
[xi', w1i', w']
hold on;
fplot(sln, [1,3], 'k');
scatter(xi, w1i, 'r');
legend('Eksak', 'Aproksimasi');Jika kita run script file tersebut, maka program akan mengeluarkan dua macam output, yaitu tabel serta plot perbandingan solusi eksak dan aproksimasi seperti di bawah ini: